
twenty seventh June – 3D Telemetry utilizing Google Earth – Similar to a sim however for actual!
Due for launch shortly contains: Including your personal google sketch up fashions, gear/fashions database, maxpilot,mega, kml, logging, sharing of config and kml/mannequin info
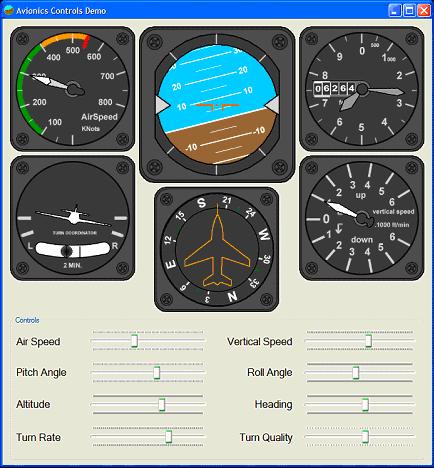
Subsequent job previous to launch to make a HUD/OSD as a substitute of the strong devices displayed under.
At present I’m including help for a serial digicam. The serial digicam is an easier system than actual video however works fairly nicely. The Kml output may also embrace an choice to point out photos for any a part of the journey
launch later in 12 months to incorporate two approach telemetry.
the prevailing performance talked about under will stay legitimate, utilizing google earth sim is non-compulsory
Undertaking renamed to “ArduFab” (Beta)
fifteenth June 2010 – FAB 1.2 Flight Laptop Model 1
BETA Hyperlink right here
14th June Replace – right here
Please don’t use for precise flight. That is beta and never totally working or examined!
For all those that tried the sooner model .. “I’ve refreshed the msi it wasn’t setup appropriately sorry”
Because of so many contributors for placing their initiatives on the internet. I’ve used many individuals code!
What’s working
Getting into a com port, setting a baud and clicking the “ON” button will learn ardupilot telemetryThe devices that seem once you change “on” will present valuesThe Log will present you uncooked knowledge from the ArduPilot.The log will can even present Perspective and PositionThe H marker on the map exhibits the place the ardupilot presently is (In progress!)(There’s a massive delay earlier than the map exhibits the proper info. To be mounted)If the telemetry is switched on earlier than the ArduPilot is began then the map exhibits the waypointsOnly net hyperlinks work within the treeThe abstract may be very fundamental in the mean time and solely applies if a full begin up has been
What isn’t working
Fairly a bit!The radio window solely exhibits throttle, may present battery however not testedThe radio window can’t be resized correctlyThe map exhibits your waypoints however wants way more workAccess to configuration device and code editorSaving of journeysSaving of configurationsDirect IMU telemetry is carried out however held again for testingWaypoints checkbox on the logAll menu objects and power bar buttonsMap resetZero altitudeTwo approach comDiagnostics and extra instrument controlsFlight ComputerSet residence through mapClear map / reset mapAdding properties reminiscent of ardupilot supply pathVideoAdditional units of indicators + night time/day mode effectsReplay journeyLots of config optionsVisible and audible alarms
History______________________________
This was the unique undertaking that I discovered on the web that received me fascinated by a home windows floor station.
The sensible ArduPilot floor station prompted me to search for an answer as a result of it’s tough for me to have labview put in on my machine. Does not adjust to our software program audit and in addition to that I’m not glad concerning the worth of labview.
I like arduino and the microsoft micro framework, the 2 merchandise appear to have their locations on this world. As such I made a decision to see if the Micro framework may present a 3/5 volt mini floor station.
My undertaking has developed since I discovered these controls however I embrace a hyperlink as a result of the maths on this undertaking makes creating scalable/resizable shifting controls quite simple.
http://www.codeproject.com/KB/miscctrl/Avionic_Instruments.aspx
GroundStationT
My floor station undertaking is now working with textual content primarily based imu output or with the ardupilot. The instrument controls at the moment are single widget home windows that may be re-positioned and resized independantly.
The primary management is the angle indicator management. When it’s moved all different management transfer with it. The mouse wheel is used to extend/lower the scale of an instrument.
The applying has a foremost body however the instrument controls are displayed outdoors of the principle body. Yhis permits the body to be minimized and the devices to occupy your entire display screen.
The view menu presently has a google map exhibiting present place and subsequent waypoint, present work is to allow the map to be displayed rather than the bottom (under the sky) within the angle indicator and to permit extra transparency of different devices.
The google map hyperlink goes to be attention-grabbing to develop alonside a Telit GSm module that I’ve. By the google code initially got here from the ArduPilot config device, so hats off to the intelligent floor station pair!
I initially coded the processing of serial telemetry and the instrument controls utilizing the micro body and a tahoe II board. This proved the undertaking would work and as soon as the varied instrument controls are working with confirmed examined values, I indend to transform the undertaking again to the micro framework.
The present home windows undertaking could be discovered right here however it’s untested within the subject and shouldn’t be used for precise flight monitoring. The present undertaking is only a .exe, it requires microsoft home windows framework 3.5 and can fail to run if you do not have it put in.
FYI: Present cores (board help) offered by MF4 are as follows however you can even construct your personal utilizing the free porting package!
ARM v4,
· ARM Thumb
· Thumb-2
· Blackfin
Improvement Boards
The porting package gives pattern ports accessible for the event boards listed under. These pattern ports embrace the supply code.
– Atmel SAM9261-EK growth board (ARM core AT91SAM9261)
– Atmel SAM9RL64-EK growth board (ARM core AT91SAMRL64)
– Atmel SAM7X-EK growth board (ARM core AT91SAM7X512)
– Phytec phyCORE-ARM7/LPC2294 (Speedy Improvement Equipment PCM023, ARM core LPC2294 by NXP)
– Embedded Artists EA-LPC2478 growth board (ARM LPC2478 by NXP)
– Crossbow MOTE2 platform from Crossbow (for Marvell PXA271 processor)
– Freescale i.MXS growth package (Freescale MC9328MXS)board for i.MXS processor
Reminiscence Necessities
The reminiscence necessities for the .NET Micro Framework rely solely on which options you utilize. In its smallest type, the framework requires 64 Kb of RAM and 256 Kb of flash reminiscence.



")
